
- Published on
Waspr Project - The step to step motors
The step to step motors
- Authors
- Name
- Mr. Goferito
- @Mastodon


März 13 - The step to step motors
TODO Translate this!
Como decía el amigo Yisus, no sólo de servo motores vive el hombre. Y dado que el proyecto no parece avanzar voy a considerar otras opciones. Muchas cosas que aprender, y muchos fracasos por descubrir.
Miro más videos de YouTube y leo algún que otro post. Esta vez sobre motores de pasos.
Los motores de pasos son otro tipo de motores eléctricos. Se utilizan cuando hace falta situar el motor en algún punto concreto, y poder volver con precisión a ese punto cuantas veces haga falta en un futuro. Por ejemplo, las impresoras 3D llevan este tipo de motores para posicionar la boquilla por la que sale el plástico justo encima de la capa anterior, capa tras capa.
Los motores de pasos sólo aceptan ciertas posiciones, y giran moviéndose paso a paso de posición en posición. Entonces, si se quiere volver a una posición determinada, sólo hay que recordar cuantos pasos se dieron en una dirección para luego girar en dirección contraria el mismo número de pasos.
En un principio había descartado los motores de pasos porque leyendo las especificaciones veía que estos motores (por lo menos los económicamente accesibles) sólo pueden moverse en un número muy pequeño de pasos. Esto era inaceptable para la precisión que yo buscaba. Si sólo pueden situarse en 64 posiciones diferentes, significa que lo mínimo que los puedo girar son 5'6 grados. Esto implica que sólo podría mover el láser en saltos de 5 en 5 centímetros. Y esto sólo si lo uso con la distancia entre la mesa y la pared (menos de un metro). Si quisiera o quisiese usar más distancia (un metro entero), el paso mínimo sería aún mayor. Necesitaría avispas como puños para poder darles.
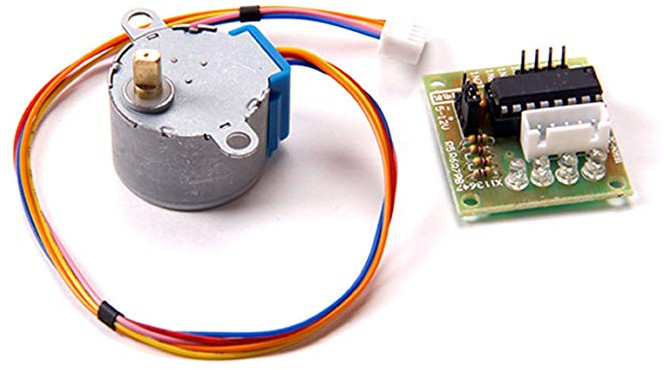
Peeeero, resulta que algunos motores de pasos incluyen engranajes de reducción. Esto implica que estos motores a) van a girar algo más lento, b) tienen más fuerza, y c) cada paso que gira el motor se traduce en un giro mucho más pequeñito del eje. Y, casualmente, el motor de pasos que incluye mi fabuloso kit de aprendizaje de Arduino... tiene reducción. Y una reducción bastante considerable: 1/64. Esto implica que con este motor de pasos, disparando desde la mesa a la pared, podría mover el laser con precisión de milímetros. Suena prometedor.
Miro tutoriales sobre cómo conectar el motor al arduino y cómo moverlo poco a poco. El objetivo es comprobar que realmente puedo moverlo en pasitos más pequeños que los servos. Conectarlo es algo más engorroso. Para conectar un servo sólo hacen falta 3 cables. Para conectar el de pasos hace falta una controladora a mayores, que lleva cuatro cables hacia el motor, otros cuatro hacia el arduino, y otros dos para la alimentación.
Descargo un diseño de una pieza 3D de una cabeza que se engancha al eje del motor que tengo. Así podré pegar otro láser a la cabeza para hacer pruebas. Imprimo la pieza. Pongo la pieza en el eje del motor. Pego un diodo láser a la cabeza. Dejo el láser apuntando a la pared. Hago pruebas con la precisión y la velocidad. El paso mínimo es... mucho más pequeño que con los servos! Donde hay vida, hay esperanza.
Pero no todo van a ser buenas noticias. Un problemilla que le veo a usar estos motores en vez de servos, es que los servos sólo giran un máximo de 180 grados, y cada vez que se inician vuelven al centro. Esto hacía que el láser se recentrase cada vez que reiniciaba el arduino. Los motores de pasos pueden dar todas las vueltas que quieran. Cuando algo empiece a ir mal, que irá, y los motores empiecen a girar varias vueltas en vez de los pocos grados que quiero que giren, se van a enredar los cables, y lo que es peor, el láser podría llegar a apuntar en cualquier dirección. Con los servos, el láser no podía llegar a darse la vuelta y apuntarme a mi. Con los diodos que estoy usando esto aún no es un problema, pero si llego al punto de necesitar usar lásers más potentes va a ser un problema no tener esa limitación. Por otro lado, un gran punto a favor de usar estos motores de pasos, es que la controladora, tiene lucecitas.
Bueno, parece que los motores de pasos así a priori podrían solucionar el problema de la precisión. Ya veré como solucionar los demás problemas más adelante. El único problemilla urgente es que sólo tengo uno. Para hacerme otra torreta necesito dos. Así que compro 5 más, por 17 euros.