
- Published on
Waspr Project - From galvos to Turrets
KISS principle for the win
- Authors
- Name
- Mr. Goferito
- @Mastodon


Februar 13 - From galvos to Turrets
TODO Translate this!
El galvo casero, funcionar, funciona. Pero es un rollo trabajar con él. Necesita que el láser y los espejitos estén siempre perfectamente alineados, y a la mínima que se mueve algo ya no apunta a donde debería. Así es muy difícil hacer pruebas y medir la precisión. Creo que ha sido todo un éxito en la dirección equivocada.
La ventaja de los galvanómetros es que al mover únicamente los espejitos permiten hacer muchos más movimientos por segundo que si los motores tuviesen que cargar con algo más pesado (como un láser grande). Los galvanómetros suelen utilizarse para proyecciones con láser o proyectos donde hace falta mover el puntero miles de veces por segundo. Pero para lo que yo quiero hacer no necesito tanta velocidad. Imagino que como mucho podré dar una orden de movimiento por cada imagen que reciba de la cámara, eso pone el límite en unos 30 movimientos por segundo, como mucho.
De momento, lo que quiero conseguir es un sistema que reciba imágenes de la cámara, encuentre en la imagen un objetivo fácil de reconocer y apunte con el láser en la dirección de ese objectivo. Con la complejidad que tiene mi galvanómetro va a ser más dificil hacer pruebas y progresar en la dirección de tener la cámara y el láser sincronizados. Por lo menos para un primer prototipo creo que sería útil tener una torreta láser con la menor cantidad de partes móviles posible. Cuantas menos piezas, menos probabilidades hay de que algo se tuerza.
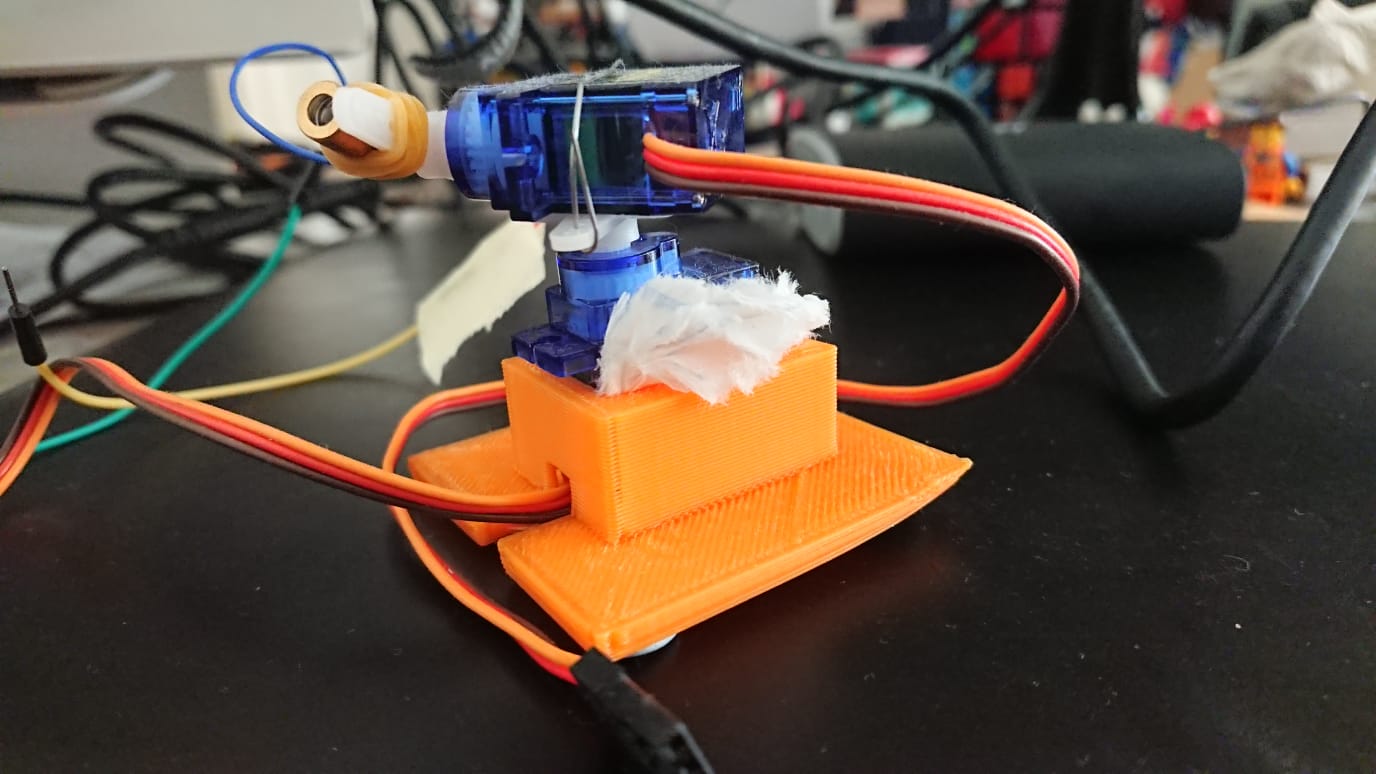
Pensando en cómo simplificar el cacharro lo más posible, se me ocurre que simplemente puedo pegar un motor a otro.
Compro unos diodos láser pequeñitos, en dos tiendas distintas (por si uno no vuelve a llegar), por 1 euro cada diodo. Diseño una pieza muy simple que mantiene uno de los motores de pie sobre la mesa. La pieza me queda un poco grande así que relleno los huecos con papel higiénico. Puede que el papel higiénico incluso ayude a absorber vibraciones. Todo ventajas. Engancho con alambre y pegamento el segundo motor perpendicular al primero. Pego con blue tack el diodo láser al segundo motor. Conecto los motores y el láser al arduino.

Meto en el arduino otro programa que mueve los motores para probar que todo está bien conectado.
Y a la primera! Parece que le voy pillando el tranquillo.
Pongo aquí otro vídeo en el que hago una prueba con la velocidad a la que podría llegar a mover el puntero.
Parece que para apuntar y perseguir bichos es más que suficiente.